
Designing a Measurement System for Rowing: Boat Acceleration and Movement
In the last part of this series, I discussed the challenges in measuring boat speed and their implications for designing a good boat speed sensor for use in rowing. In this part I want to take a look at what other types of measurements are useful for evaluating rowing performance beyond individual power production and boat speed. Furthermore, I will go into detail how measuring parameters about the movement of the boat can help us get better measurements of boat speed and distance traveled.
Here’s a quick recap of the articles in this series:
- Using Measurements in Rowing – talks about what we can measure, why we should do so and what it means
- Designing a Measurement System for Rowing: The different levels of measurements in Rowing
- Designing a Measurement System for Rowing: Force and Power on the Oar
- Designing a Measurement System for Rowing: Boat Speed
- Designing a Measurement System for Rowing: Boat Acceleration and Movement
But first, let us take a look at how a boat moves through the water.
Boat Movement
While traveling through the water, a boat never follows an idealized straight line. Instead, it translates and rotates in 3D space. Understanding how the boat moves is critical for setting the correct rigging and improving rowing technique by minimizing wasteful boat movements.
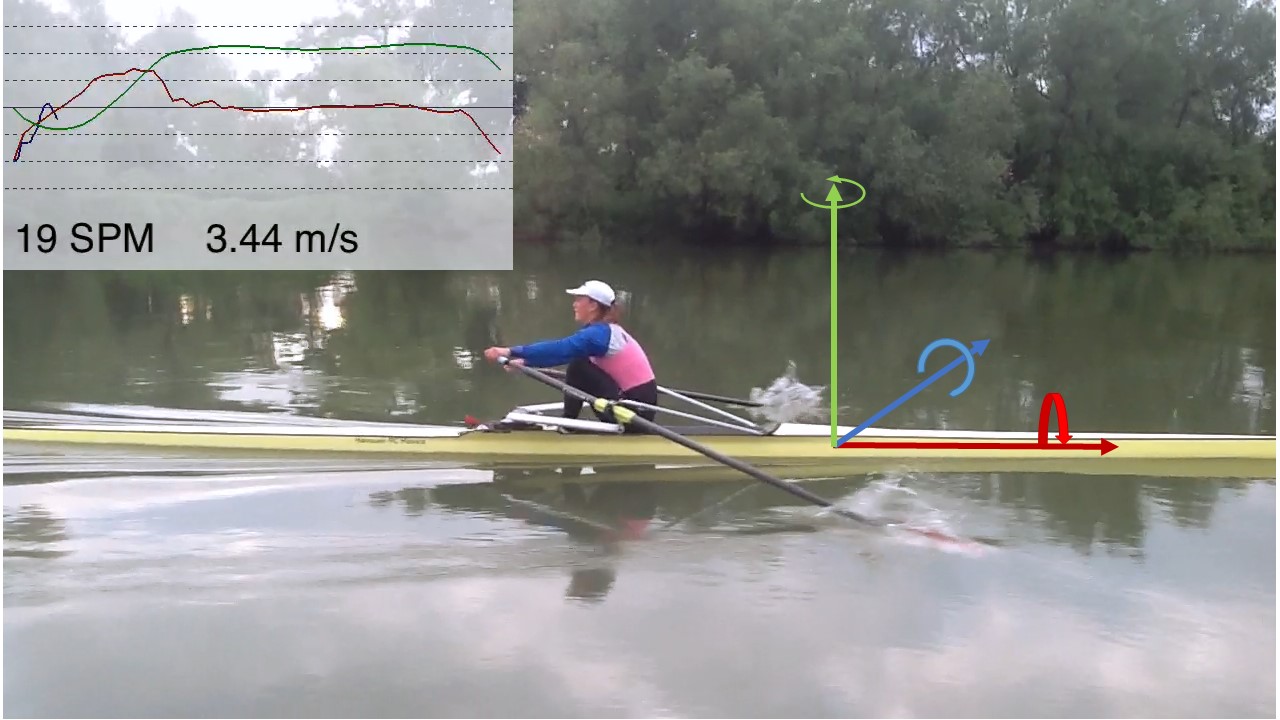
Measurement axis for rowing boat movement projected on to a rowing boat. Boat (red), Vertical (Green) and Lateral (blue).
Translation means that all points of the boat move by the same distance through space. A translation along the boat axis (red), is what takes us from start to finish in a race. A translation along the vertical axis describes a lift of the boat out of the water or the boat sinking further in. Side-wind would cause a translation along the lateral axis. In aviation terms, the roll axis corresponds to the boat axis, pitch to the lateral axis and yaw to the vertical axis.
Rotation on the other hand describes a circular movement of points around a common axis. For rowing, a rotation around the boat axis is what we describe as rolling to port or starboard when the boat is not in balance. Changing course is a simple rotation around the vertical axis. Rotation around the lateral axis occurs when the crew moves on the sliding seat and thus moves the center of mass from bow to stern. As the crew moves towards the stern, we see the stern sinking in and the bow lifting out of the water.
The complexity in rowing lies in the fact that all these movements happen at the same time and cannot be easily separated and quantified visually. For example, the dipping of the bow we see at the finish is the result of a rotation around the lateral axis (“pitch”/”nick”) as well as a translation around the vertical axis (“heave”/”stomp”). Unfortunately, use of these terms in the rowing community is not consistent, but this is what we like to refer to here. I’d be happy to accept corrections or suggestions of better terms.
Three dimensional translations and rotations are can be measured with an inertial measurement system that is attached to the boat and uses different sensors to measure translation and rotation.
Boat Acceleration
While looking at individual force production e.g. at the oars or at the stretcher, it is easy to miss the “bigger picture” for how these forces combine to produce boat speed.
The interaction of forces in a boat and the momentum exchange between the members of the crew and the boat can be very complex. Hence, it is beneficial to measure a “boat force”, that is the sum of all forces in the boat in the direction of travel. A good proxy for measuring this boat force is measuring boat acceleration, which is directly proportional to the boat force divided by the mass of the boat and crew.
While measuring boat acceleration sounds easy, especially since 3D MEMS Accelerometers have become widely available, there are a few details that make it non-trivial to do correctly. First, we cannot assume that the typical positioning of the sensor on the boat is perfectly aligned with all three axis of the boat. When you mount the sensor on the canvas for example, the software for evaluating the sensor has to compensate for the inclination angle of the canvas. Second, when we want to express boat acceleration relative to the measurement axis system that we projected on a rowing boat above, we need to take into account that the boat can rotate during the drive which changes the rotation of the sensor relative to the frame of reference that we want to express measurements in. Furthermore, we need to eliminate the effects of gravity from the measurements. To correct for these three problems, the software needs to keep a 3D orientation model of the boat and project measurements from that model onto the frame of reference. These non-trivial calculations must be performed in realtime to keep up with a data rate of at least 100Hz.
Boat Rotation
We can measure boat rotation using a combination of two sensors, a gyroscope and a magnetometer. Why two? Well, one of them alone would just not be good enough for the precision we need in rowing. A gyroscope measures the angular rate of rotation, e.g. how fast a rotation is occurring. Gyroscopes react very fast, but when you integrate the data to get an absolute rotation angle this angle will drift away very fast due to measurement noise (integrating adds up and squares every measurement error). A magnetometer on the other hand measures absolute orientation relative to the earths magnetic field. Magnetometers have the disadvantage that they’re very slow to react to changes in orientation. With a fair bit of math we can thus combine data from these two sensors into a model to get a rotation measurement that reacts quickly and yet does not drift away.
Two wasteful rotations are of primary interest in rowing: course and roll. Maintaining a straight course is important because any movement of the boat not along the boat axis wastes energy. This is especially important in a pair, where any imbalance between the port and starboard side results in a change of course.
Looking at the absolute rotation can help a crew and their coach pinpoint the magnitude of the problem and lines out in which part of the stroke is steering towards port or starboard. Here comes the next trick. In order for a body to rotate, a force must be applied which results in, you guessed right, an acceleration. To pinpoint where in the stroke the rotation is created, we can thus look at lateral acceleration (of course you can find this point in a rotation graph too, but it is more clear to see in the acceleration graph).
This is similar for roll, which hints at a balance problem in the boat. Both of these parameters are not all too interesting when looking at a single stroke. But when we conduct a typical stroke analysis and see that the boat is typically hanging on the starboard side or typically steering to starboard in the first half of the drive and to port in the second half we know what to work on.
Boat Translation
For boat translation, two parameters should be of primary interest to coaches and athletes.
An exact measurement of vertical translation helps us determine the magnitude of heave that the boat experiences. Due to the typical shape of boats, the wetted surface area of the shell increases dramatically when the boat is pushed further into the water. Since the total drag of the shell is proportional to the wetted surface area, any unnecessary “bouncing” of the boat in and out of the water in particular at the finish has a negative effect on boat speed. Similar to the situation for rotations, total translation helps coaches determine the magnitude of heave, while vertical acceleration can give coaches and the crew a good insight into when and why they “dip/heave” the boat the into the water. Experimenting with different rigging and technique at the finish can help reduce this unwanted heave to a minimum.
However, the most important measurement remains the translation of the boat along the boat axis. Not only does an accurate translation measurement help us to determine the distance covered per stroke, but it is also required for an accurate calculation of the average speed per stroke.
Combining Sensors for Accurate Boat Speed Measurements
Remember where we discussed the measurement of boat rotation above and that an accurate system needs to combine the output of two different sensors so that we compensate for their deficiencies? The situation is very similar for measuring boat speed and translation. In the previous part we discussed the challenges in producing an accurate speed measurement based on GPS location and speed measurements alone. A GPS based system works reasonably well for measuring long distances when the inherent measurement errors are small compared to the total distance. But when we want to measure short distances such as the distance per stroke, these inherent errors can quickly result in a measurement error of +/- 50%.
For building the Rowing in Motion Sensorbox we implemented a model that combines inertial measurement data (accelerometer, gyroscope, magnetometer) with a high quality professional GPS solution that delivers doppler-shift speed measurements and position data at a rate of 10Hz. This combines the advantages of sensors that react to changes in boat speed quickly (inertial sensors) and a GPS that produces stable longer-term speed and distance measurements. Furthermore, the model can take into account the exact characteristics and expected measurement errors of the sensors that we use inside the box to even further enhance the quality of results.
Using a custom developed sensor fusion engine that runs at 100Hz, we can accurately use this model to determine boat acceleration, boat speed and translation. This type of sensor fusion requires some advanced mathematics and a few clever tricks so that we can calculate it in realtime, but the results are outstanding.
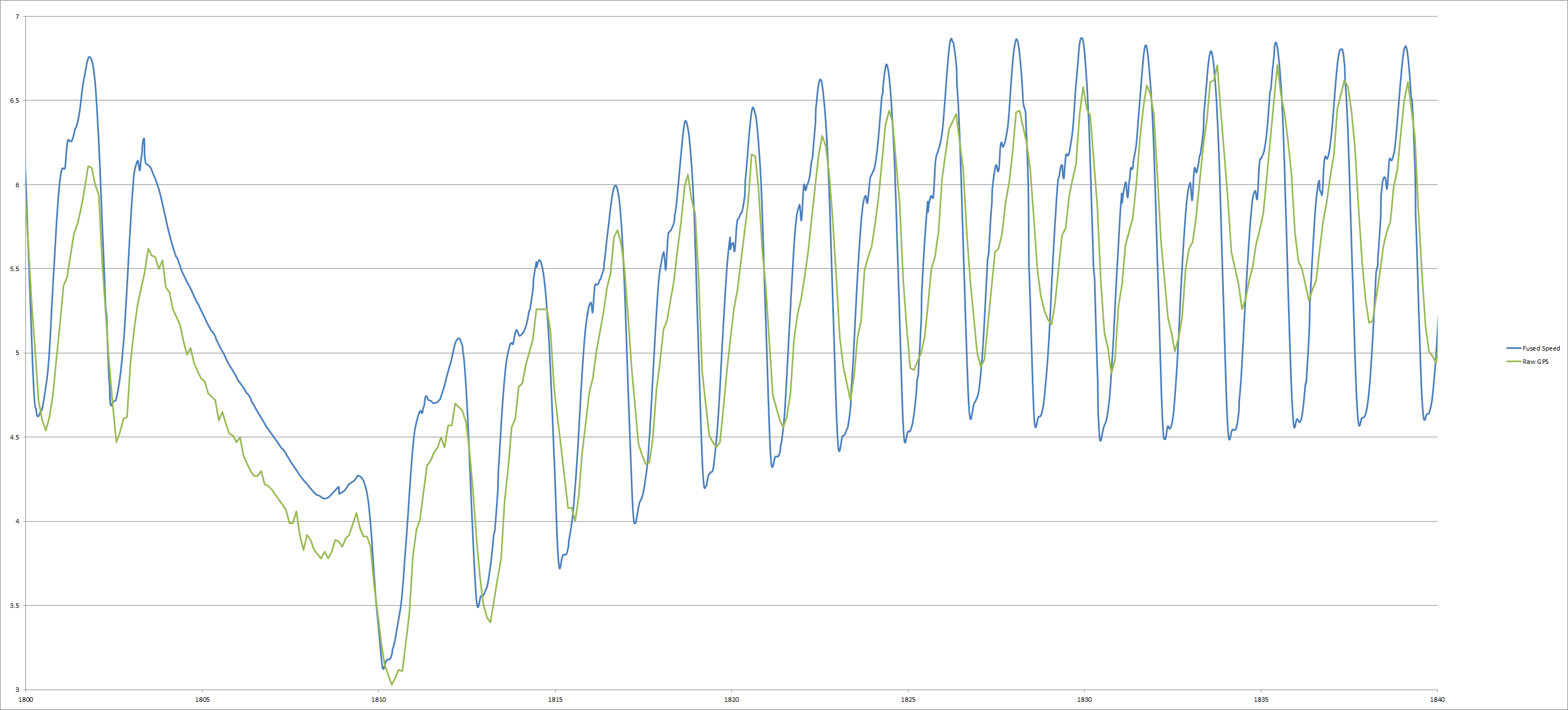
Raw GPS Speed Measurement (green) vs. Speed based on Sensor Fusion (blue)
The graph above shows the results of a measurement session with a prototype of the Sensorbox. The green line is the raw output of the GPS based speed measurement. Even though this is a high-rate GPS, we can see that the lower sample rate causes it to seriously misrepresent the actual changes in instantaneous boat speed. Keep in mind that these speed measurements from the GPS are not based on the location data, but purely on Doppler-shift measurements which is a feature only found in higher-quality receivers. An “instantaneous” speed measurement based on GPS location data (in this case it would give us the average speed for 0.1s) has so much measurement noise that it doesn’t even properly fit on the chart above. Using a combination of GPS based speed measurement and the inertial sensor data however, we can calculate boat speed estimates at 100Hz that capture the full details of changes to boat speed while eliminating any drift that would result if we were just integrating the inertial sensor data alone.
Because the inherent GPS measurement errors for location data are so much worse (at the speeds that we’re dealing with in rowing) compared to Doppler-shift speed measurements, an accurate calculation of distance per stroke is not possible based on GPS alone. Additionally, we have a significant sampling rate problem because we cannot always get a position measurement close enough to the time the catch happens. The situation is even worse for lower-rate GPS systems. To illustrate this, assume the boat travels at an average velocity of 5m/s, and the GPS system has a measurement interval of 1s, which would mean that the boat would moves 5m between measurements. One could of course interpolate these location measurements, but then there’s still the inherent location precision error of >2m one has to add the error introduced by interpolation.
This is by the way one of the reasons most consumer-grade GPS devices such as smartphones and GPS watches have so much problems producing accurate speed measurements for short distances. Our Sensorbox on the other hand is designed exactly for this purpose and achieves great results by combining GPS data with high precision inertial measurements as well as optional impeller measurements for much more accurate speed and location estimates.
Interesting article. I would just use the aviation terms yaw, pitch and roll, as you did.
The dip of the stern at the catch comes from two factors, first the movement of the body mass in sliding towards the stern, Nothing can be done about this unless you use sliding riggers which are illegal. Secondly from the speed on the slide as one approaches front stops. The harder one hits frontstops teh harder one has to brake increasing the force on the footplate which is angled at 44%. When vectorized, half the braking force is pressing the stern down. The perceived remedy for this is to float into the catch with little or no braking. However see Kleshnev who states that it works for rates under 24 spm but impossible for higher rates. See also Drew Ginn who advocates accelerating into fronts tops.
The dip of the bows at the finish comes first from the mass of the bodies moving towards the bows. Nothing can be done about this. Secondly it arises by leaning back too far and swinging the body up and forward quickly. The modern technique is not to lie back more than 25 degrees. See also Drew Ginn who recommends the slow recovery.
It would be interesting to see how different styles affect Yaw. Also whether moving the centre of gravity towards the stern by lengthen in the bows and shortening the stern canvases would make any difference. It would keep the bows up but make them liable to more movement.
I fully agree with your assertion re. the dip on the stern. The vector in which force is applied on the stretcher is variable within reasonable limits though (rigging and force application by the athlete). Floating into the catch is indeed impossible at higher strokerates (though I’d argue the threshold is 26spm but individual mileage may vary).
Accelerating into front stops is what you need to do at high spms to a) achieve spms and b) prevent stepping on the stretcher too early. However, this “accelerating” into front stops needs to be applied with care, you cannot blindly pull on the stretcher. See my other comment at http://www.rowinginmotion.com/stroke-efficiency-explained/
A probably negligible aspect is that slides rise towards the bow, with the idea that they compensate for the change in pitch angle. If the slide angle is steeper then the variation between catch and finish angle of the hull towards the water, this could create an additional downwards force as the athletes slide up. This force acts close to the center of mass though, so it may not create an additional change in pitch angle.
I’m pretty sure that on all Empachers and Fillipis I’ve raced in my career the bow canvas is indeed longer than the stern canvas! Good point.